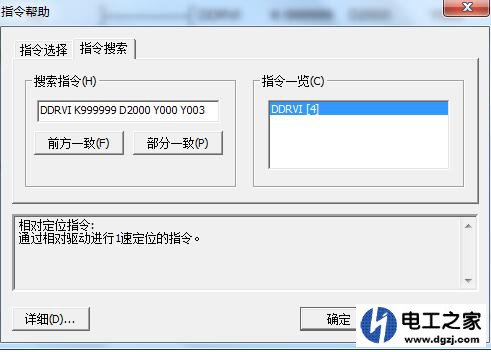
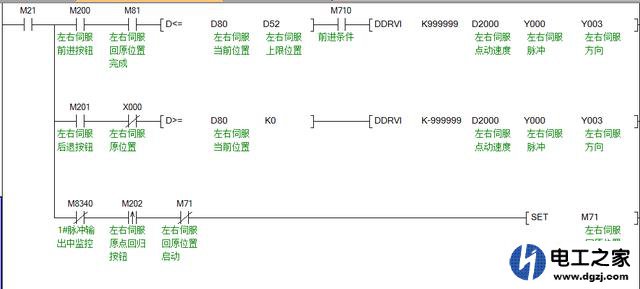
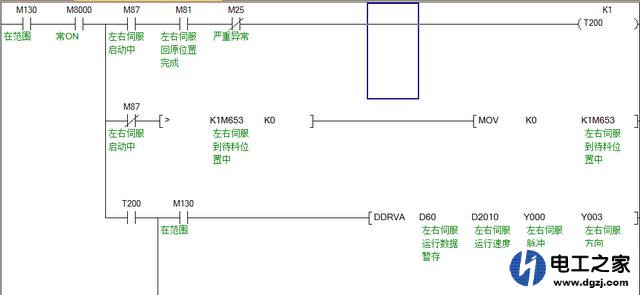
如下图,就是相对定位指令。 看下图,下面我是一个项目里用的这个指令,就是一个点动前进后退功能,因为它是相对当前位置,当M200这串条件触发时,伺服或者步进电机就以D2000存放的速度向正方向前进,因为我的相对位置是999999,几乎是最大了,只要一直通,就会一直前进。 M201通是就想反方向一直走。 下面是绝对定位指令,就是相对原位0,比如D60的值是100,那么这条指令就定位到100的位置。