定位卡的设计:定位模块以STM32为主控制核心。在该定位模块中使用的是ST(意法半导体)STM32WCBU6x芯片,该芯片采用32位 ARMCortex-M3内核;STM32WCBU6x集成了2.4GHz IEEE8.2.15.4兼容的收发器,拥有128KB的Flash和8KB的RAM,是一款高性能的无线片上系统(SoC)。该主控制原理图如图3所示。
图3 主控制器原理图
电路分析:该系统需要外置MCU来控制模块的数据收发,因此外部MCU需要与模块进行通信,其连接方式为(USART)串口。模块提供一个符合标准的 USART接口,其IO电平限制为2.4~3.6V,标称使用3.3V逻辑电平。模块串口在不使用硬件流控制的情况下其发送(TX)端连接到外置MCU的接收(RX)端;模块的接收(RX)端连接到外置MCU的发送(TX)端。
总结:本定位系统的设计中硬件部分的Zigbee模块采用STM32作为主控制器,提高了整个系统的工作效率,对人员定位的精确性提供了很大的帮助。该方案中的 Zigbee设备可采用普通电池供电,一节电池至少能够使用6个月,在一定程度上降低了成本。对于通讯距离与信号强度的关系探讨方面,采用最大似然估计法,减小了误差。
相关热词:
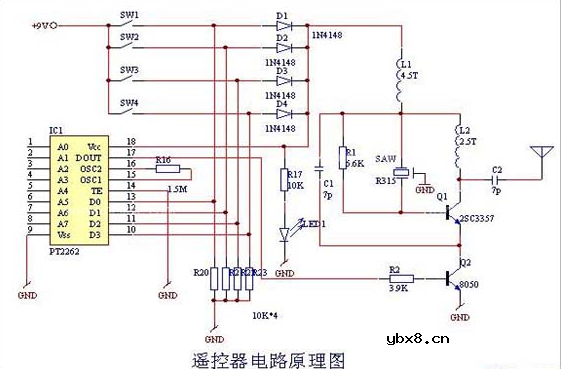
 无线遥控器电路图制作
无线遥控器电路图制作
时间:2026-03-07
 无线电遥控门铃电路原理图
无线电遥控门铃电路原理图
时间:2026-03-07
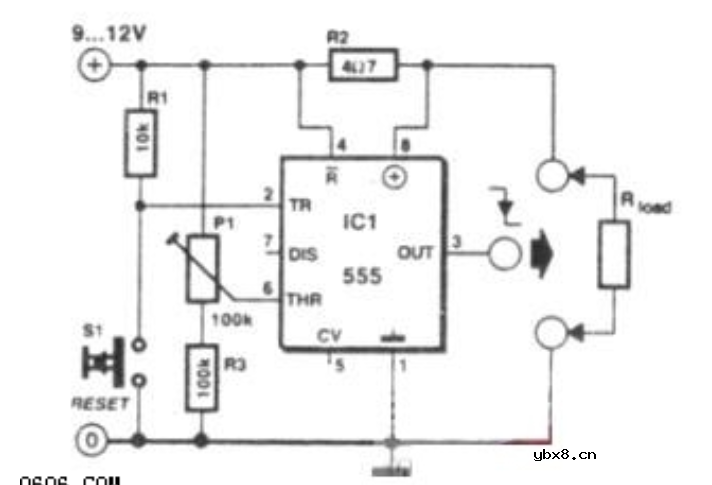 NE555过流保护检测器电路图
NE555过流保护检测器电路图
时间:2026-03-07
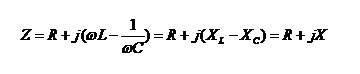 串联谐振升压原理
串联谐振升压原理
时间:2026-03-07
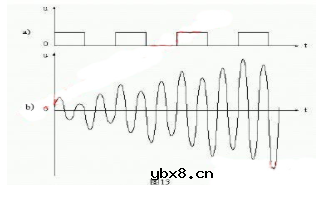 谐振回路的工作原理
谐振回路的工作原理
时间:2026-03-07
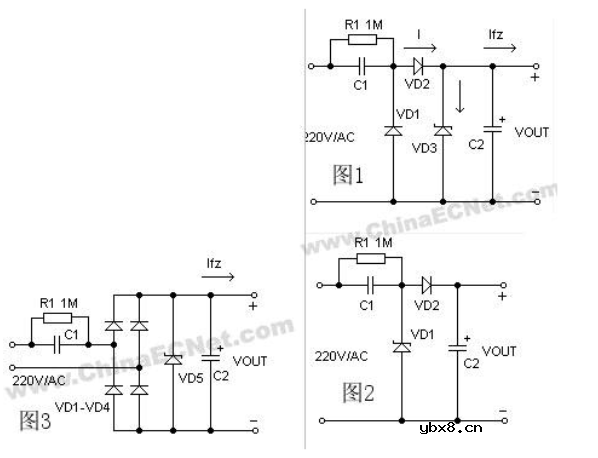
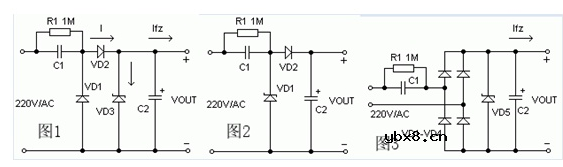 电容降压电路原理
电容降压电路原理
时间:2026-03-07
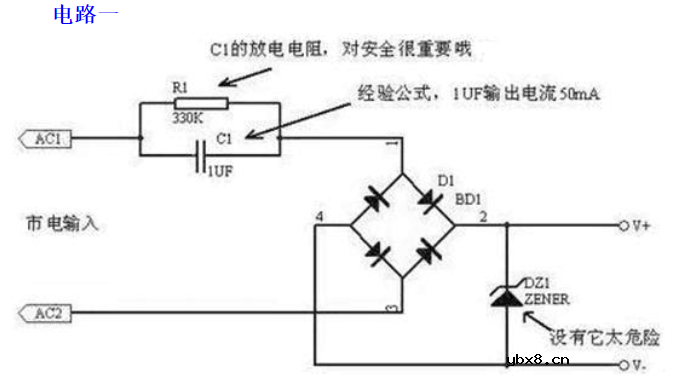 实用的电容降压电路
实用的电容降压电路
时间:2026-03-07
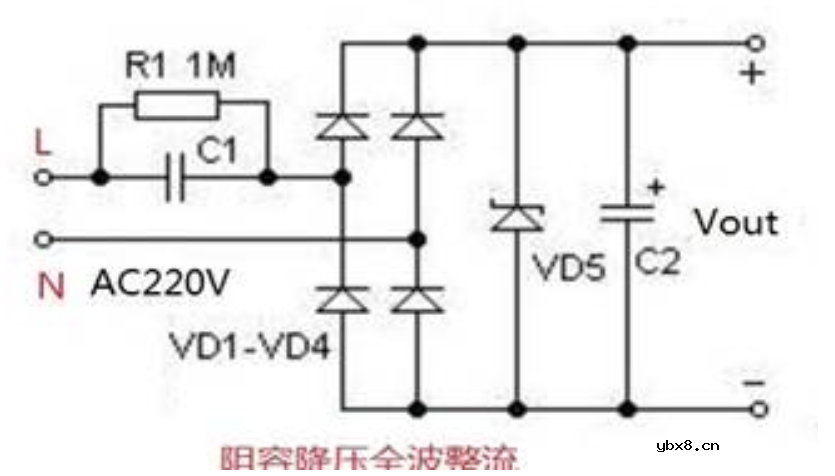
 低成本的阻容降压电路原理图分析
低成本的阻容降压电路原理图分析
时间:2026-03-07
 阻容降压原理及电路
阻容降压原理及电路
时间:2026-03-07
 阻容降压电路的误区
阻容降压电路的误区
时间:2026-03-07
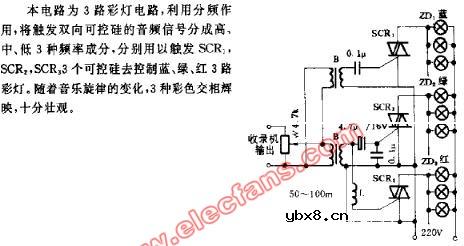 彩灯电路
彩灯电路
时间:2026-03-05
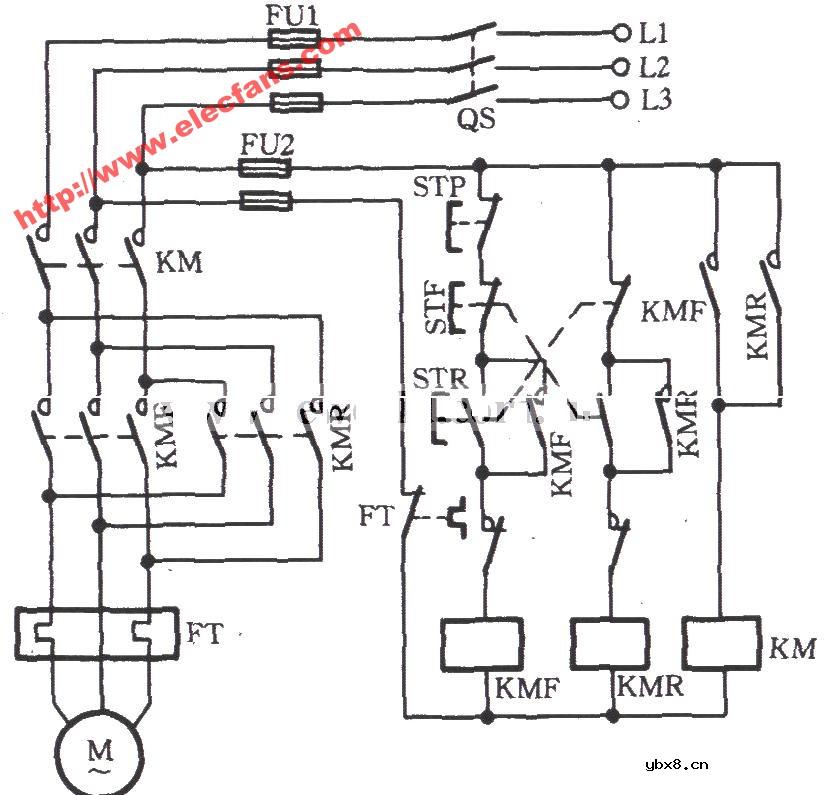 电动机单线远程正反转控制电路图
电动机单线远程正反转控制电路图
时间:2026-03-04
三相异步电动机原理
时间:2026-03-04
三相异步电动机的拆装详讲
时间:2026-03-04
三相异步电动机的七种调速方式
时间:2026-03-04
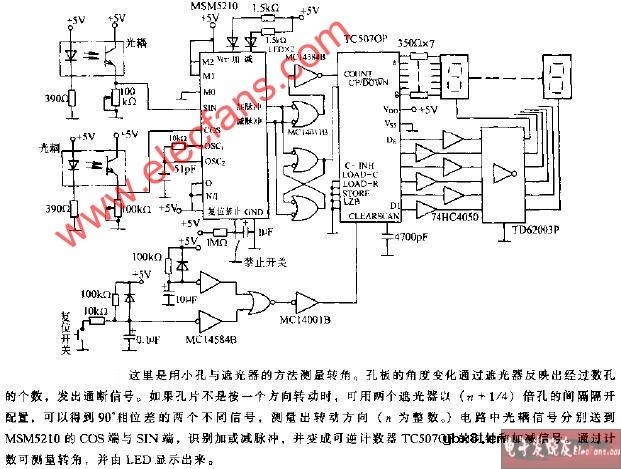 转角测量电路
转角测量电路
时间:2026-03-05
 经典的正弦波发生电路
经典的正弦波发生电路
时间:2026-03-05
 USB转232电路图
USB转232电路图
时间:2026-03-04
电度表的工作原理
时间:2026-03-04
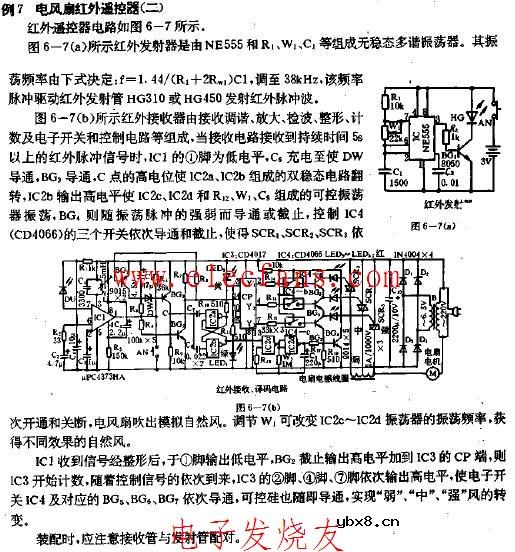 电风扇红外遥控器2
电风扇红外遥控器2
时间:2026-03-04