|
在之前的文章中,我们大多讲的都是在windows操作系统下的应用案例,因为大多人使用的是windows系统,也熟悉如何操作。而在实际应用中,有不少客户的电脑系统是linux系统,那么在linux系统下如何使用我们的USBCAN转换器呢? 准备工作 我们需要准备: 装有linux系统的电脑: 这里使用虚拟机搭建ubuntu-18.04.2-desktop-amd64,ubuntu是一种带桌面的linux系统
 硬件配置: NiMotionUSBCAN转换器(一端为USB口,另一端为航插型或端子型,用于CAN通信)
 驱动程序文件: NiMotionUSBCAN转换器驱动程序(官网下载或联系客服)
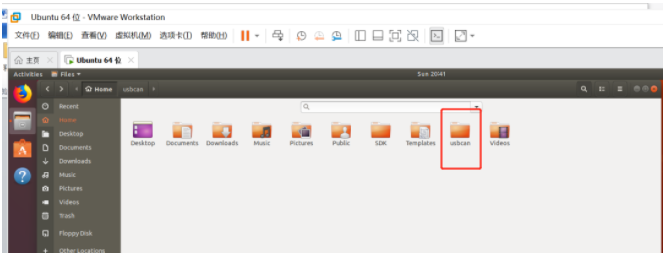
 操作实例 1. 打开系统文件“Files”,右键 新建文件夹 ,命名为“usbcan”
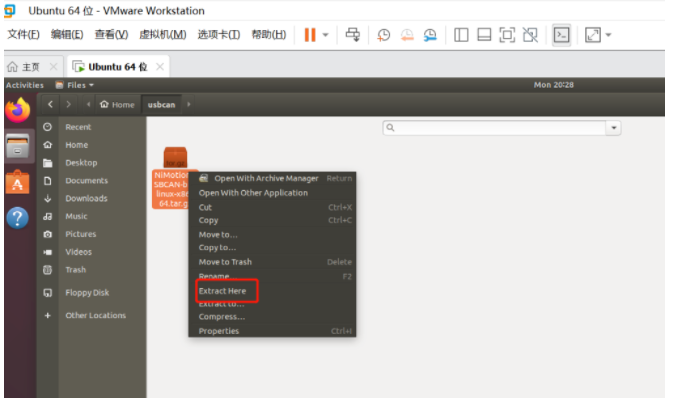
 2. 将 驱动程序文件 拷贝到此文件夹下,解压并进入解压目录
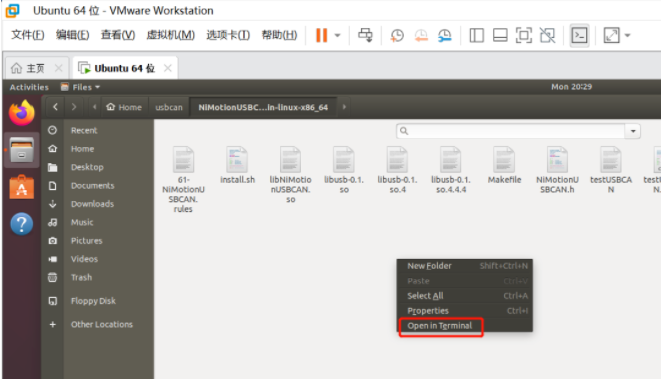
 3. 右键选择“ Open in Terminal ”(打开终端)
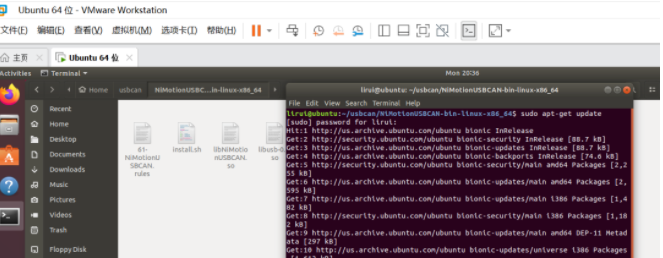
 4. 在 linux 下 安装 libusb-1.0 ,在终端窗口执行以下命令:
 5.拷贝动态库 到/usr/lib,在终端窗口执行以下命令:
 6.允许普通用户访问 USB 设备 (1) 添加 usbfs 用户组:
 (2) 将当前用户(user)添加到 usbfs 用户组:
 (3) 将 61-NiMotionUSBCAN.rules 文件拷贝到/etc/udev/rules.d 目录:
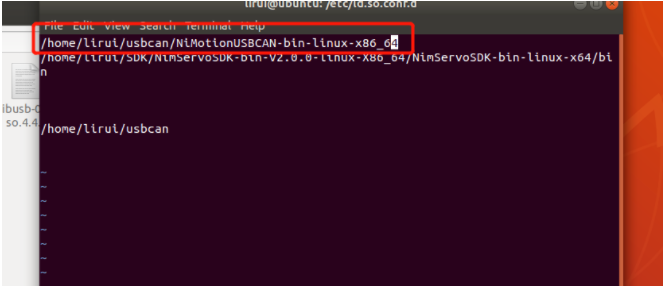
 7.通过新建.conf文件配置永久SDK (1)获取当前SDK的路径:
 (2)进入配置路径下:
 (3)使用管理员权限新建.conf文件:

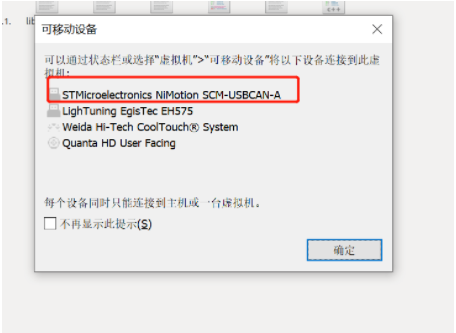
 8. 将 USBCAN转换器插入USB接口, 点击状态栏设置连接到虚拟机,如果您系统本身是linux系统,直接插入即可。
 9. 运行 测试程序 :“./testUSBCAN”
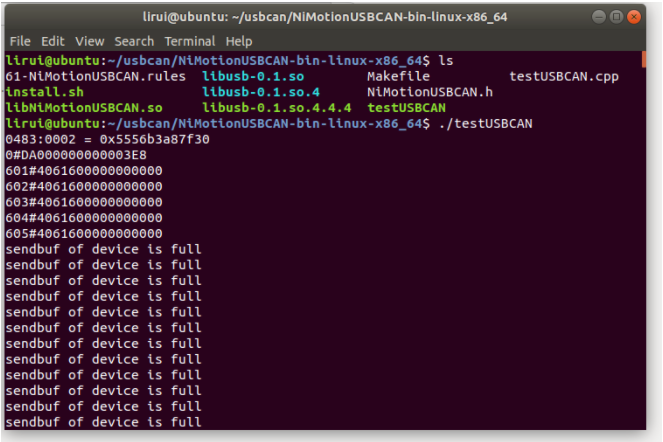 到此,ubuntu系统下NiMotionUSBCAN 转换器的使用环境已经成功搭建完成,并能正常驱动 NiMotionUSBCAN 转换器。 后面只要连接电机就能实现电机与计算机之间的正常通信,下篇会为大家带来 ubuntu系统下如何控制PMM系列CANopen通信一体化伺服电机运行使用 。 以上就是今天分享的全部内容,更多精彩请关注我们! (责任编辑:admin) |