常见主动转向系统有主动前轮转向系统AFS和四轮转向系统(也称为主动后轮转向)。主动前轮转向是随着线控转向技术的发展而发展起来的一项技术,并且随着宝马的主动转向系统装配实车而进入实用阶段。由于主动前轮转向与传统车辆的结构能够很好兼容,同时对车辆操纵稳定性的提高效果明显,显示出了良好的发展前景,成为转向系统未来发展的主要方向之一。
1 主动前轮转向系统的工作原理
目前可用于乘用车的主动转向系统主要有两种形式:一种是以宝马和ZF公司联合开发的AFS系统为代表的机械式主动转向系统,通过行星齿轮机械结构增加一个输入自由度从而实现附加转向,目前已装配于宝马5系的轿车上,以及韩国的MANDO、美国的TRW、日本的JTEKT公司也有类似产品;另一种是线控转向系统(SWB),利用控制器综合驾驶员转向角输入和当时的车辆状态来决定转向电机的输出电流,最终驱动前轮转动。该系统在许多概念车和实验室研究中已广泛采用,如通用公司的Sequel燃料电池概念车就采用了线控转向技术。
线控转向和机械式主动转向系统最大的区别体现在当系统发生故障时,机械式主动转向系统仍能通过转向盘与车轮间的机械连接确保其转向性能,而线控转向必须通过系统主要零件的冗余设计来保证车辆的安全性。由于上述安全性和可靠性的原因,目前法律上还不允许将线控转向系统直接装备车辆。
1.1 机械式主动转向系统
下面以宝马的AFS系统为例,介绍机械式主动转向系统的结构和工作原理。该系统主要由三大子系统组成:液压助力齿轮齿条动力转向系统、变传动比执行系统和电控系统。系统原理图如图1所示。

该系统除传统的转向机械构件外,主要包括两大核心部件:一是一套双行星齿轮机构,通过叠加转向实现变传动比功能;二是Sewtronic液力伺服转向系统,用于实现转向助力功能。在驾驶过程中,驾驶员输入的力矩和转角共同传递给扭杆,其中的力矩输入由液力伺服机构根据车速和转向角度进行助力控制,而角输入则通过由伺服电机驱动的双行星齿轮机构与控制器输出的附加转角进行角叠加,经过叠加后的总转向角才是传递给齿轮齿条转向机构的最终转角。其中,控制器输出的转角是根据各个传感器的信号,包括车轮转速、转向角度、偏转率、横向加速度经综合计算得到的。由于宝马主动转向系统不仅能够对转向力矩进行调节,而且还可以对转向角度进行调整,因而可以使转向输入与当前的车速达到最佳匹配。
 一种利用数字电路设计的简易信号灯
一种利用数字电路设计的简易信号灯
时间:2026-03-07
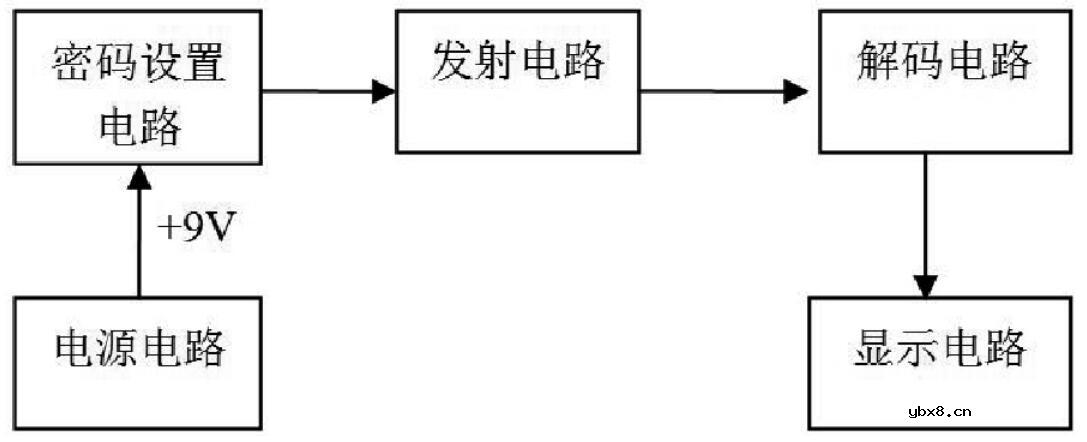 基于数字电路的密码锁设计方案
基于数字电路的密码锁设计方案
时间:2026-03-07
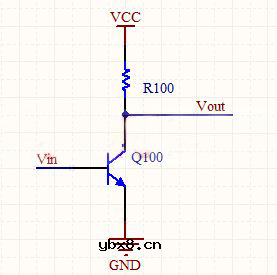
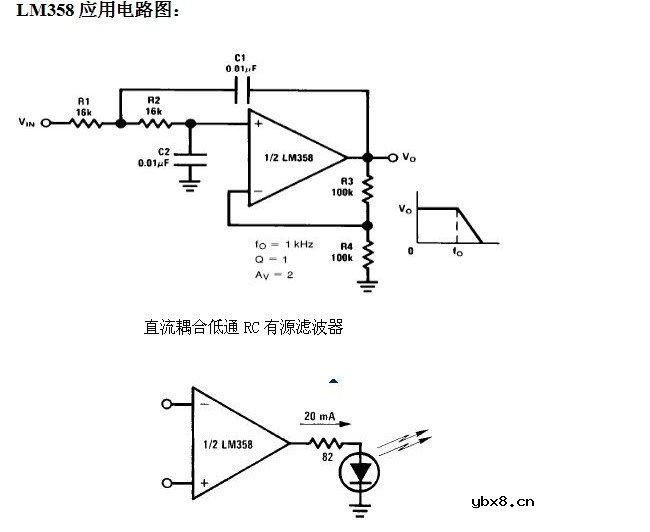 6种简单电路图之LM358应用电路图(直流耦合...
6种简单电路图之LM358应用电路图(直流耦合...
时间:2026-03-07
 基于MAX4370的系统故障保护电路设计
基于MAX4370的系统故障保护电路设计
时间:2026-03-07
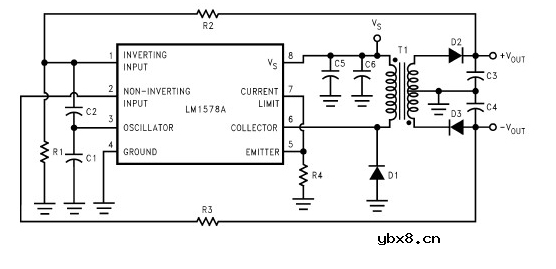 LM1578A开关稳压器组成的RS232电源电路
LM1578A开关稳压器组成的RS232电源电路
时间:2026-03-07
 用D-CAP模式的TPS53355芯片如何设计RCC纹波...
用D-CAP模式的TPS53355芯片如何设计RCC纹波...
时间:2026-03-07
 欠压电路工作原理 专家网友来深度剖析欠压电...
欠压电路工作原理 专家网友来深度剖析欠压电...
时间:2026-03-07
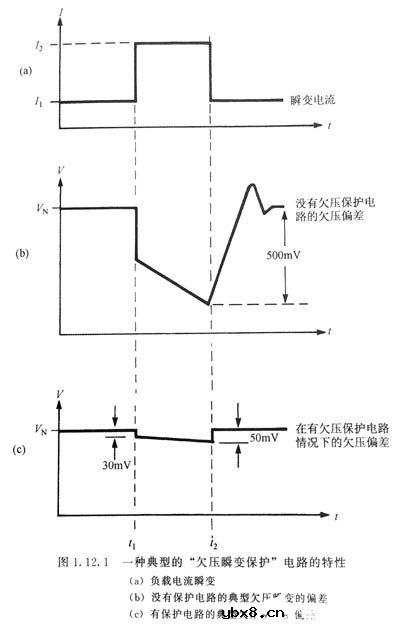 欠压保护电路基本工作原理
欠压保护电路基本工作原理
时间:2026-03-07
 数字电桥电路之LCR数字电桥连接 五种数字电...
数字电桥电路之LCR数字电桥连接 五种数字电...
时间:2026-03-07
 经典功放电路图之A类,B类,AB类,D类,G类...
经典功放电路图之A类,B类,AB类,D类,G类...
时间:2026-03-07
什么是追踪缓存/转接卡?
时间:2026-03-06
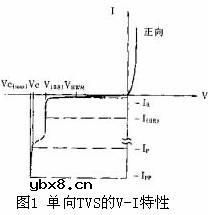 瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
时间:2026-03-04
什么是EPIC
时间:2026-03-06
什么是联合并行处理二级缓存?
时间:2026-03-06
什么是Speculative execution/SQRT?
时间:2026-03-06
什么是霍尔传感器
时间:2026-03-05
双向二极管起什么作用?
时间:2026-03-04
 半导体材料的主要种类有哪些?
半导体材料的主要种类有哪些?
时间:2026-03-04
高级封装,高级封装是什么意思
时间:2026-03-04
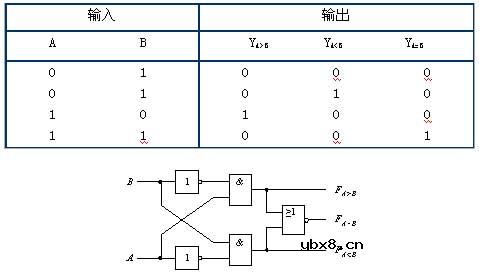 数字比较器,数字比较器是什么意思
数字比较器,数字比较器是什么意思
时间:2026-03-04