四轮转向控制(4WS),四轮转向控制(4WS)是什么意思
四轮转向系统车辆转向时,后轮的旋转方向与前轮相反,以时转弯半径尽可能小并改善操纵特性,中速到高速客车的四轮转向系统发展历史较短,该技术的应用主要是改进操纵稳定性和转向响应性能,轿车的四轮转向系统具有以下两个功能:1、高速行驶时,以与前轮相同的方向转动后轮,减小整车的摇摆运动,从而改进转向稳定性;2、中低速行驶时,以与前轮相反的方向转动后轮,时低速行驶时转弯半径减小,中速行驶时转向响应性能得以改进。
1、4WS的基本原理
,四轮转向控制(4WS)是什么意思")
如图1所示,转弯时,转弯中心位于前后轮纵向平面法线交点处P(x0,y0),转弯半径按PQ或PO计算。当前后轮转动方向相反时,汽车转弯半径最小,否则转弯半径增大。即便是后轮不动,前轮转动,转弯半径也大于前后轮相反方向转动的半径。
,四轮转向控制(4WS)是什么意思")
如图2所示,后轮转角与前轮转角成一定的比例且方向一致时,转向性能类似2WS,但后轮以与前轮转动相同的方向转动时,横摆速度减小,中高速行驶时,汽车的转向稳定性和操纵能力均得以改善。
2、4WS的分类
表1所示为按汽车功能划分的4WS控制类型,表2为汽车结构划分的4WS控制类型。
,四轮转向控制(4WS)是什么意思")
,四轮转向控制(4WS)是什么意思")
最早的四轮转向系统是全机械式系统,这种系统是前轮转向响应型系统,后轮转向角由前轮转向角决定。
电液式四轮转向系统可分为车速/侧向加速度响应型和车速/前轮转向角/转向盘速度响应型两种。图3所示为车速响应型的电液四轮转向电子控制系统。
,四轮转向控制(4WS)是什么意思")
电液机械式四轮转向系统包括车速/前轮转向角响应型、车速/前轮转向角/摇摆速度响应型、机械液压型和电子液压型转向机构四种类型。
全电子式四轮转向系统是车速/前轮转向角/转向速度响应型系统,系统结构如图4所示,该系统后轮的转动决定于车速、车轮前轮转向角和转向盘转动速率,由带球螺旋杆齿条机构的直流电机执行器控制,该系统可同时改善汽车高速稳定性、提高转向盘快速转动下的转向响应并减小低速时的汽车转弯半径。
 LM336-5.0基准二极管输出电压的调节
LM336-5.0基准二极管输出电压的调节
时间:2026-03-07
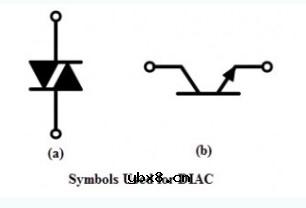 双向触发二极管的基础知识
双向触发二极管的基础知识
时间:2026-03-07
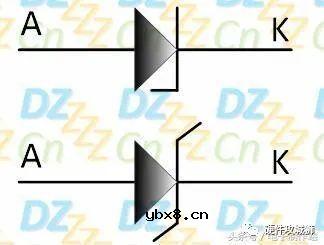
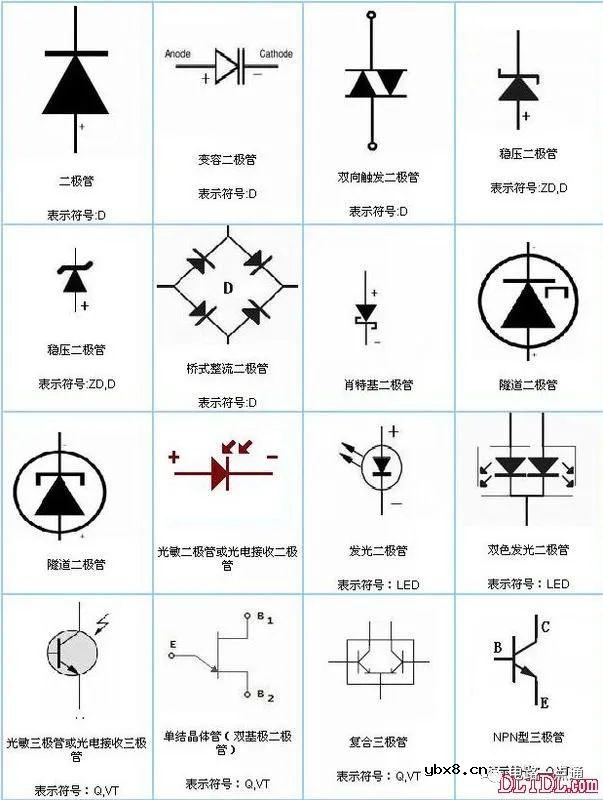 二极管符号大全及电路图形符号
二极管符号大全及电路图形符号
时间:2026-03-07
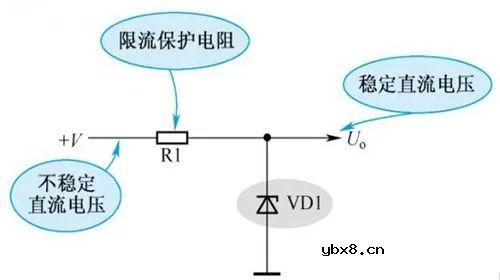
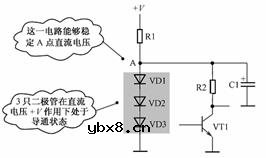 二极管简易直流稳压电路及故障处理
二极管简易直流稳压电路及故障处理
时间:2026-03-07
二极管经典应用电路详解
时间:2026-03-07
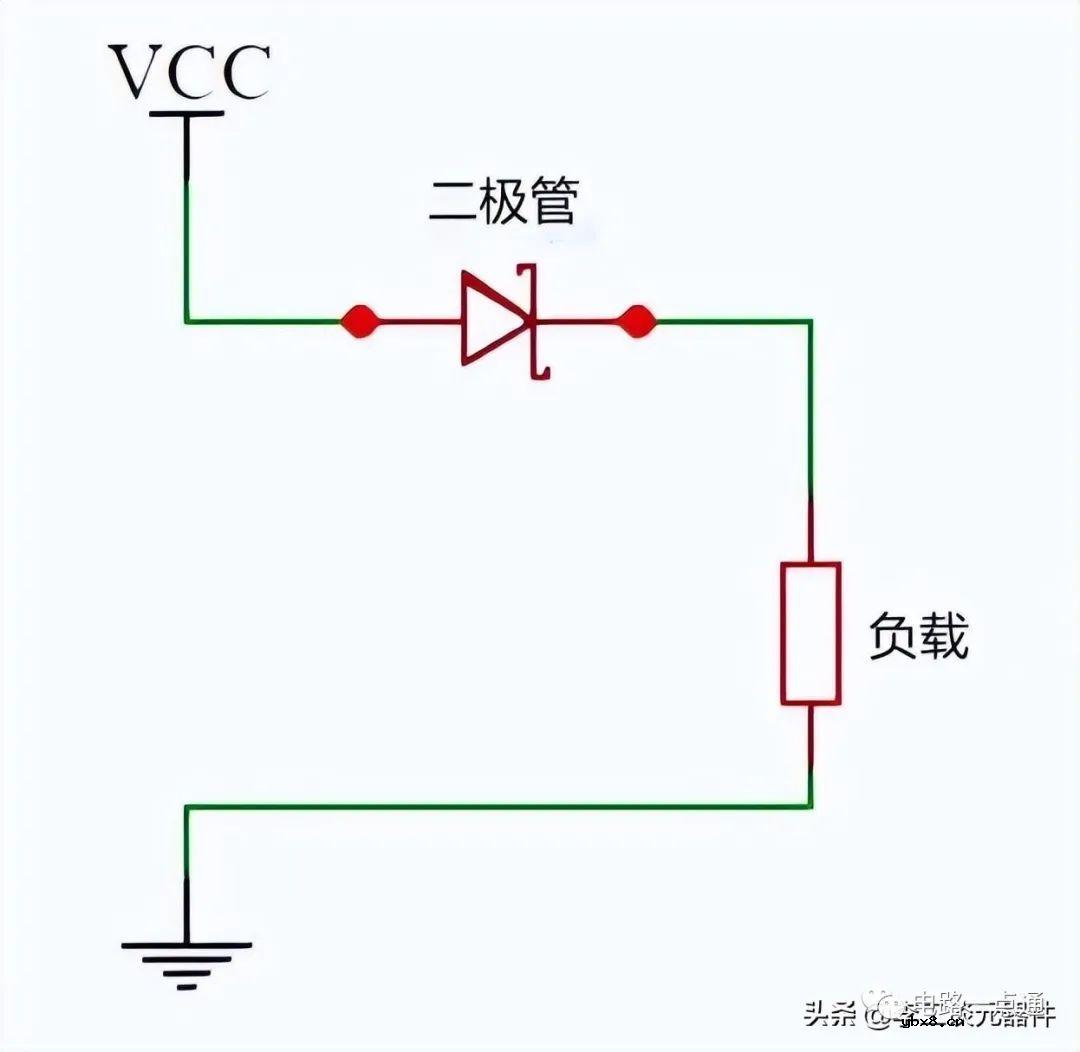 分享19个典型二极管应用电路
分享19个典型二极管应用电路
时间:2026-03-07
 稳压二极管的典型应用电路
稳压二极管的典型应用电路
时间:2026-03-07
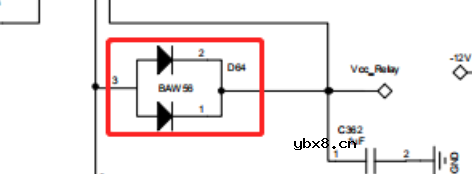 继电器并联二极管的作用
继电器并联二极管的作用
时间:2026-03-07
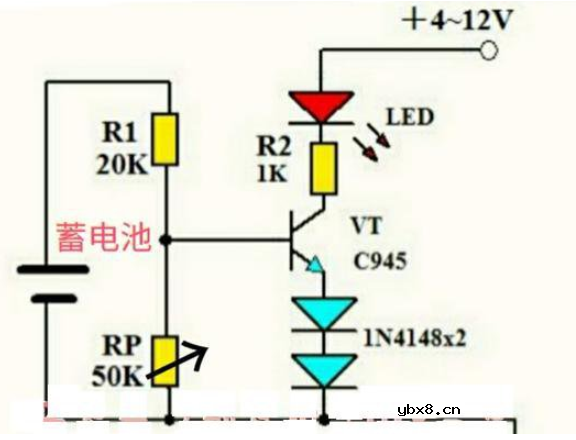 二极管正向压降设计的两款电路
二极管正向压降设计的两款电路
时间:2026-03-07
 稳压二极管的应用电路介绍
稳压二极管的应用电路介绍
时间:2026-03-07
什么是追踪缓存/转接卡?
时间:2026-03-06
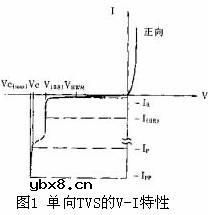 瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
时间:2026-03-04
什么是EPIC
时间:2026-03-06
什么是联合并行处理二级缓存?
时间:2026-03-06
什么是Speculative execution/SQRT?
时间:2026-03-06
什么是霍尔传感器
时间:2026-03-05
双向二极管起什么作用?
时间:2026-03-04
 半导体材料的主要种类有哪些?
半导体材料的主要种类有哪些?
时间:2026-03-04
高级封装,高级封装是什么意思
时间:2026-03-04
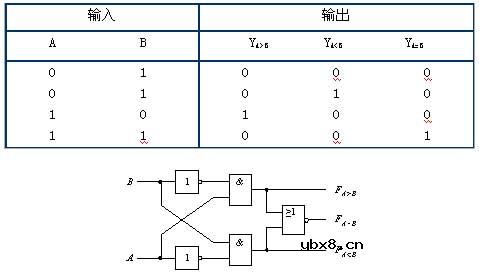 数字比较器,数字比较器是什么意思
数字比较器,数字比较器是什么意思
时间:2026-03-04